Вредоносное ПО (malware) - это назойливые или опасные программы,...


В этой статье мы поговорим о сервоприводах в проектах Ардуино. Именно благодаря серводвигателям обычные электронные проекты становятся робототехническими. Подключение серво к Arduino проекту позволяет реагировать на сигналы датчиков каким-то точным движением, например, открыть дверцу или повернуть в нужную сторону сенсоры. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также примеры скетчей.
Сервопривод – это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом.
Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.
 Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
 Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
 Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
 Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.
 Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).

(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.

При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
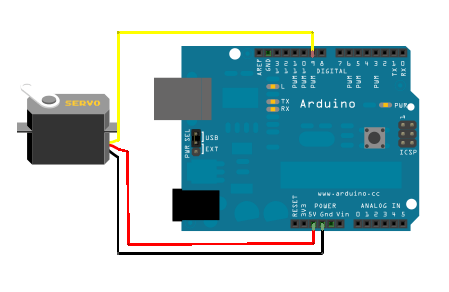
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный – к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам – принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате, т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Управление сервоприводом напрямую через изменение в скетче длительности импульсов – достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
#include
А в этом примере мы работаем сразу с двумя сервоприводами:
#include
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
//Фрагмент стандартного примера использования библиотеки Servo void loop() { val = analogRead(A0); // Считываем значение с пина, к которому подключен потенциометр val = map(val, 0, 1023, 0, 180); // Преобразуем число в диапазоне от 0 до 1023 в новый диапазон - от 0 до 180. servo.write(val); delay(15); }

Если вы собрались купить самый дешевый и простой сервопривод, то SG 90 будет лушим вариантом Этот серво чаще всего используется в управлении небольшими легкими механизмами с углом поворота от 0° до 180°.
Технические характеристики SG90:
Цвета проводов стандартные. Сервопривод стоит недорого, он не обеспечивает точных настроек начальных и конечных позиций. Для того, чтобы избежать лишних перегрузок и характерного треска в положении 0 и 180 градусов лучше выставлять крайние точки в 10° и 170°. При работе устройства важно следить за напряжением питания. При сильном завышении этого показателя могут повредиться механические элементы зубчатых механизмов.
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения. При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов.
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
– это привод, вал которого может встать в заданное положение или поддерживать заданную скорость вращения. Другими словами, валом сервопривода можно управлять, например, задавая ему положение в градусах или определенную частоту вращения.Сервоприводы используются в самых разных областях, например, в робототехнике они помогают моделировать различные движения роботов. Сервоприводы – эффективное решение для перемещения механизмов в пространстве.
Устройство сервопривода
Если говорить об основных элементах сервопривода, то он состоит из блока управления, мотора и датчика.
Управление происходит через печатную плату, к которой подключен мотор постоянного тока и потенциометр (датчик). Внутри блока управления также находятся шестерни редуктора.

Фактически сам привод представляет собой электрический мотор с редуктором, именно электромотор преобразует электричество в механическое действие. Но скорость вращения мотора не всегда подходит для достижения поставленных целей. Чтобы было возможно управлять вращением мотора, используется редуктор. В итоге он понижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует получаемый на выходе результат.
Также из сервопривода выходят три провода. Два из них питают мотор, третий провод используется для подачи сигнала, который несет в себе заданное значение.

Принцип работы
При включении электромотора запускается вращение выходного вала. К нему можно подключить или присоединить то, чем в дальнейшем планируется управлять.
Сервопривод получает заданное значение, после этого сравнивает данное значение со значением на своем датчике. В случае расхождения блок управления стремится достичь и поддержать заданное значение, чтобы оно по возможности совпадало со значением, которое поступает с датчика.
Основные технические характеристики сервопривода
Крутящий момент (Усилие на валу) . Измеряется в кг/см. Представляет собой произведение силы на длину рычага. На практике крутящий момент отвечает за ускорение выходного вала и его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Скорость поворота . Означает скорость, с которой выходной вал сервопривода меняет свое положение. Угол изменения положения указывается в градусах.
Угол поворота . Это максимальный угол, на который может повернуться выходной вал. Наиболее распространенные значения для этой характеристики: 180° и 360°.
Габариты сервопривода . Сервоприводы бывают маленькие, стандартные и большие. Стандартные сервоприводы самые недорогие. При отклонении габаритов от стандартных значений цена, как правило, меняется пропорционально такому отклонению.
Материал шестерней . Шестерни редуктора производятся из пластика, карбона, металла. Пластиковые шестерни легкие, но не предназначены для серьезных нагрузок. Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые, идеально подходят для максимальных нагрузок.

Виды сервоприводов
Сервоприводы бывают цифровые и аналоговые.
По внешнему виду они почти не отличаются друг от друга. Основное отличие заключается в принципе управления мотором. У аналоговых сервоприводов управление происходит с помощью специальной микросхемы, цифровые сервоприводы обладают микропроцессором. Микросхема и микропроцессор способны принимать и анализировать управляющие импульсы. Только на микросхему они обычно поступают с частотой 50 Гц, а на микропроцессор – с частотой 200 Гц и более. В результате этого цифровой сервопривод мобильнее и четче реагирует на управляющий сигнал.

Цифровые сервоприводы – это новый шаг в развитии техники, и они характеризуются рядом преимуществ. К таким преимуществам относятся: высокая точность позиционирования, возможность более быстрого управления приводом, возможность поддержания постоянного крутящего момента.
Подключение к Arduino
Для достижения самых разных целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляется через кабели, которые выходят из сервопривода. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый.

Красный кабель отвечает за питание сервопривода. Коричневый - за заземление. Желтый – подключается непосредственно к плате Arduino и предназначен для передачи управляющего сигнала.
Подключение сервопривода к плате Arduino производится через ШИМ-выводы.

Итак, черный провод подключается к любому GND-пину.
Красный кабель питания (VTG) - к соответствующему выводу для подключения питания.
Белый сигнальный кабель – к ШИМ-выводу.
Питание сервоприводов
Большинство плат Arduino рассчитано на 500 мА. Исходя из этого, сервопривод является достаточно энергоемким компонентом, так как потребляет более 100 мА. Если в ходе проекта требуется использование мощного сервопривода или нескольких сервоприводов, то необходимо позаботиться об их дополнительном питании. Проблема дополнительного питания сервоприводов может быть решена следующим образом:
Обеспечить питание сервопривода от дополнительно приобретенного блока питания, например, 5 или 6 В;
При отсутствии блока питания с нужным напряжением, можно использовать стабилизатор.
Напрямую к Arduino можно подключать только маломощный сервопривод. В противном случае пользователя ожидают разные побочные эффекты: от перезагрузки платы до перегорания отдельных компонентов.
Количество сервоприводов
Количество подключаемых к плате Arduino сервоприводов ограничено. Большинство моделей Arduino предусматривает подключение 12 сервоприводов, Arduino Mega позволяет подключить до 48 сервоприводов.

Управление сервоприводом
Библиотека Servo
Библиотека для сервопривода содержит в себе набор дополнительных команд, которые позволяют вводить программу в упрощенном виде.
На сегодняшний день уже написаны программы для самых разных целей.
Библиотеки можно подобрать по ссылке .На платах Arduino за исключением модели Arduino Mega обращение к библиотеке отключает функцию analogWrite(PWM) на пинах 9 и 10. Наличие подключения сервопривода или отсутствие такового при этом роли не играет. На платах Arduino Mega можно подключить до 12 сервомоторов без отключения функции PWM.
Для управления сервоприводом предусмотрена библиотека Servo.h.

Вызывается она через #include
Управляющий сигнал
Для управления сервоприводом управляющий сигнал приобретает решающее значение. Он представляет собой импульс, который имеет нужную ширину и посылается с соответствующей частотой. Ширину импульса можно вбивать в программном коде вручную, методом подбора достигнув точного угла, или использовать команды библиотеки, указывая нужный угол в градусах. У разных марок сервоприводов ширина импульса для поворота выходного вала на определенный угол может быть различна.
Импульсы отвечают как за движение сервопривода, так и за его неподвижное положение. Работа сервопривода происходит в замкнутом цикличном кругу посылаемых импульсов.
Управляющие команды
Управление сервоприводом через библиотеку основано на следующих командах:
Если в работе сервопривода возникают нарушения, то, как правило, об этом говорят соответствующие шумы: жужжание, потрескивание и прочее. Ниже рассмотрим основные причины таких шумов.
Невозможность поворота на заданный угол
Бывают случаи, когда поворот сервопривода на заданный угол невозможен. Например, на его пути возникает какая-либо преграда. Этой преградой может стать закрепленное на сервоприводе устройство или его часть. Упираясь в преграду, сервопривод начинает характерно жужжать. Чтобы решить данную проблему, в программу вносятся команды, ограничивающие перемещение сервопривода путем изменения угла перемещения.
Настройки начальной и конечной позиции
Иногда необходимо подкорректировать координаты начальной или конечной позиции. Это нужно когда значения датчика и фактического положения выходного вала расходятся относительно конечной позиции последнего. Например, выходной вал находится в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. В этом случае начальная позиция не обязательно должна начинаться с 0°С, а конечная не обязательно должна заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5-10°C, и проблема будет решена.

Заключение
На сегодняшний день сервопривод – это необходимый элемент в робототехнике, с помощью которого воплощаются многие творческие проекты. Этот умный управляемый моторчик предназначен для моделирования движения. Пользоваться его функциями достаточно просто, уже написано множество программ, которые могут быть использованы в качестве трафарета для воплощения собственных идей. Сервопривод подключается к программируемому контроллеру Arduino. Все тонкости этого процесса подробно освещены как в этой статье, так и в других статьях, выложенных в сети.
Современные магазины предлагают большой выбор сервоприводов. Зная нужные характеристики, легко подобрать подходящую модель.

В конструкциях современного оборудования, создаваемого на базе высоких технологий, постоянно развиваются и совершенствуются различные автоматические процессы. Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Составной частью этих систем являются серводвигатели, которые дают возможность управлять скоростями в нужном диапазоне в установленный промежуток времени. Таким образом, все процессы и движения могут периодически повторяться, а частота этих повторов закладывается в системе управления.
Основные детали, из которых состоит типовой серводвигатель - ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.
Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени.
Разница между сервоприводом и обычным электродвигателем заключается в возможности установки вала в точно заданное положение, измеряемое в градусах. Установленное положение, так же, как и другие параметры, поддерживаются блоком управления.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.

Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.

Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Основное условие, чтобы серводвигатель мог нормально работать, заключается в их функционировании совместно с так называемой системой G-кодов. Эти коды представляют собой набор команд управления, заложенный в специальную программу.
Если в качестве примера взять ЧПУ - числовое программное управление, то в данном случае сервоприводы будут взаимодействовать с . В соответствии с уровнем входного напряжения они способны изменить значение напряжения на возбуждающей обмотке или якоре электродвигателя.

Непосредственное управление серводвигателем и всей системой осуществляется из одного места - блока управления. Когда отсюда поступает команда на прохождение определенного расстояния по оси координат Х, в цифровом аналоговом преобразователе возникает напряжение определенной величины, которое и поступает в качестве питания привода этой координаты. В серводвигателе начинается вращательное движение ходового винта, связанного с энкодером и исполнительным органом основного механизма.
В энкодере вырабатываются импульсы, подсчитываемые блоком, выполняющим управление сервоприводом. В программе заложено соответствие определенного количества сигналов с энкодера, установленному расстоянию, которое должен пройти исполняющий механизм. В нужное время аналоговый преобразователь, получив установленное число импульсов, прекращает выдачу выходного напряжения, в результате, серводвигатель останавливается. Точно так же под влиянием импульсов восстанавливается напряжение, и возобновляется работа всей системы.
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и , предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
Благодаря унифицированным размерам, эти устройства легко и просто устанавливаются в любые конструкции. Они безотказны и надежны, каждый из них работает практически бесшумно, что имеет большое значение при их эксплуатации на сложных и ответственных участках. Даже на невысоких скоростях можно добиться точности и плавных перемещений. Каждый сервопривод может быть настроен персоналом, в зависимости решения тех или иных задач.
В качестве недостатков отмечаются определенные сложности при настройках и сравнительно высокая стоимость.
Возможности Arduino очень разнообразны: от обычного контроля температуры и сбора данных до управления 3D принтерами и умными домами. Также с помощью этой платы можно программировать различные механизмы и даже роботов. Для таких целей очень часто применяются различные движки, моторчики и приводы.
Самыми распространенными и популярными в механизмах являются шаговые двигатели и сервоприводы. О последних мы и поговорим в этой статье. Сервоприводы являются самыми дешевыми и практичными в использовании моторчиками. Их размеры и масса малы, а комбинация из таких модулей поможет успешно создавать роботов.
Начнем знакомство с самым популярным из них, по-другому он еще называется SG90 (Tower Pro Micro Servo 9G). Сервопривод представляет небольшую коробку, в которую запрятан сам механизм. Научившись правильно писать программный код, можно управлять положением вала.
Для подключение сервопривода к Arduino , на плате используется 3 контакта (для подключения используются 3 провода “папа-папа”): питание (5V), заземление и аналоговый выход (расположены на панели digital ). Наглядная схема подключения изображена на рисунке ниже:
Внимание! При подключение более чем одной сервы или одной, но более мощной, можно допустить просадку напряжения на плате Arduino (из-за слабой стабилизации на плате) Поэтому, если подключаете более одного сервопривода, то контакты питания лучше подключать к отдельному источнику, чем к плате.
После того, как подключили, можно зайти в среду разработки Arduino IDE и опробовать первую программу для проверки работоспособности модуля. Также советуем использовать библиотеку Servo.h . Она уже встроена в Arduino IDE, а значит скачивать и устанавливать ее не нужно. И кстати, эта библиотека уже содержит в себе некоторые команды и тем самым упрощает работу с сервоприводом, избавляя нас от очень длинных и занимаемых много места кодов. Она содержит в себе следующие полезные команды:
Теперь рассмотрим первую программу с использованием сервопривода.
Данная программа позволит изменять угол поворота вала на сервоприводе с течением времени:
#include ; //используем библиотеку для работы с сервоприводом Servo servo; //объявляем переменную servo типа Servo void setup() //процедура setup { servo.attach(10); //привязываем привод к порту 10 } void loop() //процедура loop { servo.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(180); //ставим вал под 180 delay(2000); //ждем 2 секунды }
#include ; //используем библиотеку для работы с сервоприводом Servo servo ; //объявляем переменную servo типа Servo void setup () //процедура setup servo . attach (10 ) ; //привязываем привод к порту 10 void loop () //процедура loop servo . write (0 ) ; //ставим вал под 0 delay (2000 ) ; //ждем 2 секунды servo . write (180 ) ; //ставим вал под 180 |
Рассмотрим на этом занятии устройство и принцип работы сервоприводов. Разберем два простых скетча для управления сервоприводом с помощью потенциометра на Ардуино. Также мы узнаем новые команды в языке программирования C++ — servo.write , servo.read , servo.attach и научимся подключать в скетчах библиотеку для управления сервоприводами и другими устройствами через Ардуино.
Сервопривод (сервомотор) является важным элементом при конструировании различных роботов и механизмов. Это точный исполнитель, который имеет обратную связь, позволяющую точно управлять движениями механизмов. Другими словами, получая на входе значение управляющего сигнала, сервомотор стремится поддерживать это значение на выходе своего исполнительного элемента.
Сервоприводы широко используются для моделирования механических движений роботов. Сервопривод состоит из датчика (скорости, положения и т.п.), блока управления приводом из механической системы и электронной схемы. Редукторы (шестерни) устройства выполняют из металла, карбона или пластика. Пластиковые шестерни сервомотора не выдерживают сильные нагрузки и удары.
Сервомотор имеет встроенный потенциометр, который соединен с выходным валом. Поворотом вала, сервопривод меняет значение напряжения на потенциометре. Плата анализирует напряжение входного сигнала и сравнивает его с напряжением на потенциометре, исходя из полученной разницы, мотор будет вращаться до тех пор пока не выравняет напряжение на выходе и на потенциометре.
 Управление сервоприводом с помощью широтно импульсной модуляции
Управление сервоприводом с помощью широтно импульсной модуляции
Схема подключения сервопривода к Arduino обычно следующая: черный провод присоединяем к GND, красный провод присоединяем к 5V, оранжевый/желтый провод к аналоговому выводу с ШИМ (Широтно Импульсная Модуляция). Управление сервоприводом на Ардуино достаточно просто, но по углам поворота сервомоторы бывают на 180° и 360°, что следует учитывать в робототехнике.
Для занятия нам понадобятся следующие детали:

В первом скетче мы рассмотрим как управлять сервоприводом на Arduino с помощью команды myservo.write(0) . Также мы будем использовать стандартную библиотеку Servo.h . Подключите сервомашинку к плате Ардуино, согласно схеме на фото выше и загрузите готовый скетч. В процедуре void loop() мы будем просто задавать для сервопривода необходимый угол поворота и время ожидания до следующего поворота.
 Подключение сервопривода и потенциометра к Ардуино Уно
Подключение сервопривода и потенциометра к Ардуино Уно
Ардуино позволяет не только управлять, но и считывать показания с сервопривода. Команда myservo.read(0) считывает текущий угол поворота вала сервопривода и его мы можем увидеть на мониторе порта. Предоставим более сложный пример управления сервоприводом потенциометром на Ардуино. Соберите схему с потенциометром и загрузите скетч управления сервоприводом.
Сервомоторы часто используются в различных проектах на Ардуино для различных функций: повороты конструкций, движение частей механизмов. Так как мотор серво постоянно стремится удерживать заданный угол поворота, то будьте готовы к повышенному расходу электроэнергии. Это будет особенно чувствительно в автономных роботах, питающихся от аккумуляторов или батареек.
Также часто читают:

Вредоносное ПО (malware) - это назойливые или опасные программы,...

Лучшие программы для восстановления данных с любых носителей информации....

Здравствуйте.Одна из самых распространенных причин, по которым тормозит...