Вредоносное ПО (malware) - это назойливые или опасные программы,...


Мы предполагаем, что владелец конструктора уже знаком с контроллером Arduino и средой проектирования Arduino IDE. Поэтому в данном описании мы не будем рассказывать, как и где скачать и установить необходимые прораммы.
Если вы с программированием Arduino сталкиваетесь в первый раз, пожалуйста познакомьтесь с подготовкой к работе на нашей странице:
В гнезда блока управления R-5 устанавливается контроллер . Поэтому и в настройках среды разработки Arduino IDE необходимо выбрать именно этот контроллер с процессором ATmega328
Теперь уже приступаем непосредственно к программированию.
Программа для контроллера Ардуино обычно состоит из 3-х частей.
В первой части, как в обычной математической задаче описываются исходные данные. Мы присваиваем названия, назначение, функционал контактов контроллера. Записываем, какие библиотеки мы будем использовать в ходе выполнения программы.
Во второй части с названием Setup пишем уже непосредственно код программы. Но этот код исполняется только один раз за время работы программы. Это необходимо для того, что бы запрограммировать выходы, входы контроллера на все время действия программы
И третья часть программы loop представляет собой команды, которые исполняются процессором в течение всего периода работы процессора.
Рассмотрим простой пример кода для движения робота.
В первой части кода мы определяем, какими контактами платы Ардуино мы будем управлять драйвером и соответственно электромоторами, придумаем название команд, что бы нам было понятно их назначение.
В блоке R-5 контакты Ардуино жестко подключены к входам драйвера.
Давайте посмотрим на рисунок ниже:
M_R
_
IN -
вход драйвера, управляющий направлением вращения правого электромотора. Высокий уровень (HIGHT) - вращение вперед.
M_
R
_
EN -
вход драйвера, разрешающий вращение правого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
M_
L
_
IN
-
вход драйвера, управляющий направлением вращения левого электромотора. Высокий уровень (HIGHT) - вращение вперед.
M_
L
_
IN
-
вход драйвера, разрешающий вращение левого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
И у нас получается следующее:
Контакт Ардуино 2 - направление вращения правого мотора
Контакт Арудино 3 - разрешение вращения правого мотора. При работе ШИМ - регулировка скорости вращения.
Контакт Ардуино 4 - направление вращения левого мотора.
Контакт Ардуино 5 - разрешение вращения левого мотора. При работе ШИМ - регулировка скорости вращения.
Пишем код.
#define DIR_R 2
// управлять направлением вращения правого мотора будем с контакта 2
#define SPEED_R 3
// управлять разрешением вращения и скоростью вращения правого //мотора будем с контакта 3
#define DIR_L 4
//управлять направлением вращения левого мотора будем с контакта 4
#define SPEED_L 5
// управлять разрешением вращения и скоростью вращения левого //мотора будем с контакта 5
//В этой части кода больше не будем задавать ни каких параметров
// приступаем ко второй части программы. Мы знаем, что в этой части кода команды //исполняются только один раз
void setup()
{
pinMode (DIR_R, OUTPUT); /
/ Драйвер управляется выходными сигналами с Ардуино.
//Поэтому мы определяем все контакты, как OUTPUT
pinMode (SPEED_R, OUTPUT);
pinMode (DIR_L, OUTPUT);
pinMode (SPEED_L, OUTPUT);
}
// И в третьей части кода мы уже пишем алгоритм работы. Т.е. то, что наш робот должен
//выполнять
void loop()
{
digitalWrite (DIR_R, HIGH);
// Команда digitalWrite устанавливает на контакте 2 высокий
//уровень. Для драйвера моторов это означает то, что мотор будет вращаться вперед
// высокий уровень на контакте 3 разрешает драйверу
//вращать электромотор
digitalWrite (DIR_L, HIGH);
delay(1000);
// Вращаем 1 сек
digitalWrite (DIR_R, HIGH);
// Низкий уровень запрещает вращение моторов
digitalWrite (DIR_L, HIGH);
delay(1000);
DigitalWrite (DIR_R, LOW);
// Включаем низкий уровень и мотор должен вращаться в
//обратную сторону
digitalWrite (SPEED_R, HIGH);
//Разрешаем вращение мотора
digitalWrite (DIR_L, LOW);
digitalWrite (SPEED_L, HIGH);
delay(1000);
DigitalWrite (DIR_R, LOW);
digitalWrite (SPEED_R, LOW);
// Вращение запрещено
digitalWrite (DIR_L, LOW);
digitalWrite (SPEED_L, LOW);
delay(1000);
}
Скопируйте текст программы и вставьте его в Arduino IDE.
После копирования обязательно проверьте, что бы комментарии в каждой строчке начинались с двух символов //.
После проверки загрузите код в контроллер. Установите контроллер в блок R-5 и включите питание робота.
Наш робот, исполняя написанный выше скетч, должен в течение одной секунды ехать вперед, затем на секунду остановиться и начать движение назад. И так как команда loop
исполняется постоянно, то робот будет выполнять эти команды пока включено питание.
1. Конструкция робота для движения вдоль стенки
На базовую тележкунадо прикрепить датчик расстояния и подключить его на 1 порт.
Датчик расстояния слегка выносится вперед:
Ориентацию датчика можно варьировать:


2. Движение вдоль стенки на П-регуляторе
Решим такую задачу. Робот должен двигаться вдоль стенки на заданном расстоянии L. Предположим, что левое колесо робота управляется мотором B, правое - мотором С, а датчик расстояния, подключенный к порту 1, закреплен несколько впереди корпуса тележки (это важно!) и направлен на стену справа по ходу движения.


В данном случае П-регулятор будет эффектно работать только при малых углах отклонения. Кроме то, движение практически всегда будет происходить по волнообразной траектории. Сделать регулирование более точным позволит введение новых принципов, учитывающих отклонение робота от курса.
3. Пропорционально-дифференциальный регулятор
В некоторых случаях П-регулятор может вывести систему из устойчивого состояния.

Например, если робот направлен от стенки, но находится по отношения к ней ближе заданного расстояния, на моторы поступит команда еще сильнее повернуть от стенки, в результате чего с ней может быть утерян контакт (датчик расстояния получает отраженный сигнал практически только от перпендикулярной поверхности).
Для защиты от подобных ситуаций добавим в регулятор дифференциальную составляющую, которая будет следить за направлением движения робота.
u=k1*(S -L)+k2*(s1-Sold), где Sold - расстояние на предыдущем шаге.

Необходимо подобрать подходящие значения коэффициентов k1 и k2. Обычно подбор начинается с пропорционального коэффициента (k1) при нулевом дифференциальном (k2=0). Когда достигнута некоторая стабильность на небольших отклонениях, добавляется дифференциальная составляющая.
4. Конструкция робота с датчиком расстояния, расположенным под углом
Описанный выше робот может объезжать стены только при малых отклонениях от прямой линии. Рассмотрим вариант, при котором на пути движения будут возникать серьезные повороты, вплоть до прямых углом. Потребуется внести модификации и в конструкцию, и в программу.
Во-первых, робот должен будет смотреть не только направо, но и вперед. Ставить второй дальномер довольно затратно. Однако можно воспользоваться эффектом того, что ультразвуковой датчик имеет расширяющуюся область видимости.

Это напоминает угловое зрение человека: кое-что он может увидеть краем глаза. Стоит воспользоваться таким свойством и разместить датчик расстояния не перпендикулярно курсу движения, а под острым углом. Так можно убить сразу двух зайцев. Во-первых, робот будет видеть препятствия спереди, во-вторых, более стабильно будет придерживаться курса вдоль стены, постоянно находясь на грани видимости. Таким образом, без добавления новых устройств будет получено более эффективное использование возможностей дальномера.
Важное замечание. При старте робота его надо будет направлять датчиком строго на стену, чтобы процесс считывания начального значения прошел без помех.Мобильный робот перемещается для решения тех или иных задач, получает данные с внешних датчиков, и должен постоянно , чтобы управлять своим движением. Все эти процессы происходят непрерывно и тесно взаимосвязаны друг с другом. Сегодня речь пойдет об основных конфигурациях колесных роботов и том, как математически описываются их перемещения. Этот материал поможет выбрать колесную конфигурацию для своего мобильного робота.
Мобильные роботы могут перемещаться в различных средах: в водной, воздушной, по земле, в космосе. И движение в каждой среде имеет свои особенности, связанные с их различными физическими свойствами.
В этой публикации я рассмотрю колесных роботов, которые способны перемещаться по достаточно плоским поверхностям.
При разработке системы перемещения робота необходимо учитывать следующие моменты:
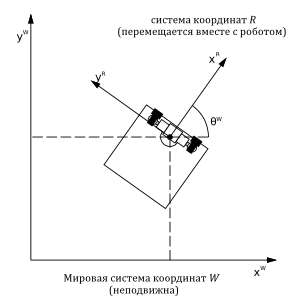
Для того чтобы математически описать движение мобильного робота нам потребуется определить системы координат. Я введу две системы координат — мировую систему координат W (буду считать что он неподвижна в пространстве), и система координат робота R , которая перемещается в пространстве и остается неподвижной относительно самого робота.

Нам необходимо определить местоположение робота, то есть мы хотим знать, как преобразовывать координаты между W и R .
Число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат), необходимых для полного описания движения механической системы.
Твердое тело, которое перемещается и вращается двигаясь по одномерному пути имеет одну степень свободы — поступательную. В качестве примера можно привезти поезд, движущийся по рельсам.
Твердое тело, которое перемещается и вращается на плоскости имеет 3 степени свободы: 2 поступательных и 1 вращательную. Пример: наземный робот.
Твердое тело, которое перемещается и вращается в 3D-объеме имеет 6 степеней свободы: 3 поступательных и 3 вращательных. Пример: летающий робот.

Особый случай — это так называемый голономный робот, который способен перемещаться мгновенно в любом направлении в пространстве его степеней свободы (робот является голономным если число управляемых степеней свободы равно полному числу степеней свободы). Голономные роботы существуют, но требуют множество моторов и необычный конструктив, что зачастую очень непрактично. Однако, наземные голономные роботы могут быть реализованы с использованием всенаправленных колес (omni-wheels).
На видео показан пример четырехколесного робота со всенаправленными колесами.
Существует множество различных конфигураций мобильных роботов.
Есть те, которые применяются реже, например, двухколесная платформа сигвей (segway) с динамическим балансом обладает хорошей высотой при малой площади и достаточно большим ускорением.

Или марсоход Opportunity, который имеет колеса на штангах для преодоления больших препятсвий.

Но чаще применяются другие типы конфигураций.
Это простые, надежные, прочные механизмы, пригодные для роботов, которые в основном передвигаются по плоскости.
Все эти роботы неголономны (используется два двигателя, но три степени свободы движения). Например, не может мгновенно двигаться в сторону.


Такая конфигурация используется в .
Робот с дифференциальным приводом имеет два мотора, по одному на каждое колесо (на рисунке — это большие колеса). Изменение направления движения достигается за счет разных скоростей (отсюда и название — дифференциальный).

Движение по дуге
Обозначим скорости колес (линейные скорости с которыми они «покрывают» поверхность) и - для левого и правого колес, соответственно, и расстояние между колесами.
Для того, чтобы найти радиус криволинейного пути, рассмотрим период движения , в течении которого робот движется вдоль дуги окружности, имеющей угол .

Такой тип роботов имеет два мотора — один для движения, другой для рулежки.

Круговое движение трехколесного робота
При условии, что отсутствует боковая пробуксовка колес, пересечем оси передних и задних колес, чтобы сформировать прямоугольный треугольник, и в результате получим:
Радиус траектории, которую описывают задние колеса:
За время расстояние вдоль этой дуги окружности, пройденное приводными колесами равно , поэтому угол на который повернется робот:

Двигатели постоянного тока, как правило, обладают высокой скоростью вращения и низким крутящим момент, поэтому зубчатая передача практически всегда необходима для управления роботом.

Если Передача 1 имеет крутящий момент , она оказывает тангенциальную силу
на Передачу 2 . Крутящий момент Передачи 2 поэтому

Изменение угловой скорости между Передачей 1 и Передачей 2 вычислим, рассмотрев скорость в точке где они соприкасаются:

Очень часто, робот оценивает свое движение путем мониторинга собственных датчиков. Это может быть, например напряжение электродвигателя и колесные датчики. Эта информация называется одометрией .
Например, на основе очень простой оценки:
Пройденное расстояние пропорционально напряжению и времени. Здесь является расчетной константой (используя знания электричества и геометрии), но также может быть получена в результате калибровки .
Энкодеры дают большую точность измерения числа оборотов колес. Информация с энкодера может быть преобразована в линейное расстояние умножением на постоянный радиус колеса. Но все же, как правило, для большей точности, все равно проводится калибровка.
Если предположить, что робот ограничивается перемещением на плоскости, его местоположение может быть определено вектором состояния , состоящем из трех параметров:
И определяют местоположение предопределенной точки «центра робота» в мировой системе координат.
Определяет угол поворота между системами координат (угол между осями и ).
Две системы координат совпадают в момент, когда центр робота находится в начале координат и .
Получая перемещения робота в некоторые моменты времени, мы можем найти весь путь, пройденный роботом, просуммировав эти значения, или перейдя к пределу (при стремлении количества измерений ) — путем их интегрирования.
При движении на плоскости мы имеем три степени свободы для определения положения, представленные при .
Рассмотрим робота, который может только двигаться вперед или поворачиваться на месте:
При прямолинейном движении робота на расстояние новое состояние будет выражено как:

Если присутствует только вращательное движение, при повороте на угол :


Для случаев и дифференциального и трехколесного роботов мы можем получить выражения для и для случая когда присутствует только движение по дуге окружности.
На втором занятии мы детальнее познакомимся со средой программирования и подробно изучим команды, задающие движение нашему роботу-тележке, собранному на первом занятии. Итак, давайте запустим среду программирования Lego mindstorms EV3, загрузим наш проект lessons.ev3, созданный ранее и добавим в проект новую программу - lesson-2-1. Программу можно добавить двумя способами:
Давайте теперь обратим свой взгляд в нижний раздел среды программирования. Из материала первого занятия мы уже знаем, что здесь находятся команды для программирования робота. Разработчики применили оригинальный прием и, сгруппировав программные блоки, присвоили каждой группе свой цвет, назвав группы палитрами.
Зеленая палитра называется: "Действие" :

На данной палитре расположены программные блоки управления моторами, блок вывода на экран, блок управления индикатором состояния модуля. Сейчас мы начнем изучение этих программных блоков.
Первый программный блок зеленой палитры предназначен для управления средним мотором, второй блок - для управления большим мотором. Так как параметры этих блоков идентичны - рассмотрим настройку на примере блока - большой мотор.

Для правильной настройки блока управления большим мотором мы должны:
Чем же отличаются режимы? Режим: "Включить" включает мотор с заданным параметром "Мощность" и после этого управление передается следующему программному блоку программы. Мотор будет продолжать вращаться, пока не будет остановлен следующим блоком "Большой мотор" с режимом "Выключить" или следующий блок "Большой мотор" не будет содержать другие параметры выполнения. Режим "Включить на количество секунд" включает большой мотор с установленной мощностью на указанное количество секунд, и только по завершению времени мотор остановится, а управление в программе перейдет к следующему программному блоку. Аналогично поведет мотор себя в режимах "Включить на количество градусов" и "Включить на количество оборотов" : только после выполнения установленного вращения мотора, он остановится и управление в программе перейдет к следующему блоку.
Параметр мощность (на Рис. 3 мощность установлена в 75) может принимать значения от -100 до 100. Положительные значения мощности задают вращение мотора по часовой стрелке, отрицательные - против часовой. При значении мощности равном 0 мотор вращаться не будет, чем "выше" значение мощности, тем быстрее вращается мотор.
Параметр мощность задается только целыми значениями, параметры: секунды, градусы, обороты могут принимать значения с десятичной дробью. Но следует помнить, что минимальный шаг вращения мотора равен одному градусу.
Отдельно следует сказать о параметре "Тормозить в конце" . Данный параметр, если установлен в значение "Тормозить" заставляет мотор тормозить после выполнения команды, а если установлен в значение "Двигаться накатом" , то мотор будет вращаться по инерции, пока сам не остановится.
Следующие два программных блока "Рулевое управление" и реализуют управление парой больших моторов. По умолчанию левый большой мотор подключается к порту "В" , а правый - к порту "С" . Но вы можете в настройках блока поменять порты подключения в соответствии с требованиями вашей конструкции (Рис. 4 поз. 1 ).

Параметр "Рулевое управление" (Рис. 4 поз. 2 ) может принимать значения от -100 до 100. Отрицательные значения параметра заставляют робота поворачивать налево, при значении равном 0 робот движется прямо, а положительные значения заставляют робота поворачивать направо. Стрелка над числовым параметром меняет свою ориентацию в зависимости от значения, подсказывая тем самым направление движения робота (Рис. 5 ).

Программный блок "Независимое управление моторами" похож на программный блок "Рулевое управление" . Он также управляет двумя большими моторами, только вместо параметра "Рулевое управление" появляется возможность независимого управления мощностью каждого мотора. При равном значении параметра "Мощность" для левого и правого мотора робот будет двигаться прямолинейно. Если на один мотор подать отрицательное значение мощности (например -50), а на второй - положительное значение (например 50), то робот будет разворачиваться на месте (Рис. 6 ).

Режимы работы этих блоков аналогичны режимам блока управления одним мотором, поэтому дополнительного описания не требуют...
Итак, теперь мы можем написать программу движения робота по какому-либо маршруту.

Программный блок "Экран" позволяет выводить текстовую или графическую информацию на жидкокристаллический экран блока EV3. Какое это может иметь практическое применение? Во-первых, на этапе программирования и отладки программы можно выводить на экран текущие показания датчиков во время работы робота. Во-вторых, можно выводить на экран название промежуточных этапов выполнения программы. Ну а в-третьих, с помощью графических изображений можно "оживить" экран робота, например с помощью мультипликации.

Программный блок "Экран" имеет четыре режима работы: режим "Текст" позволяет выводить текстовую строку на экран, режим "Фигуры" позволяет отображать на экране одну из четырех геометрических фигур (прямая, круг, прямоугольник, точка), режим "Изображение" может вывести на экран одно изображение. Изображение можно выбрать из богатой коллекции изображений или нарисовать свое, используя редактор изображений. Режим "Окно сброса настроек" сбрасывает экран модуля EV3 к стандартному информационному экрану, показываемому во время работы программы.

Рассмотрим параметры программного блока "Экран" в режиме "Текст" (Рис. 9 поз.1) . Строка, предназначенная для вывода на экран, вводится в специальное поле (Рис. 9 поз. 2) . К сожалению, в поле ввода текста можно вводить только буквы латинского алфавита, цифры и знаки препинания. Если режим "Очистить экран" установлен в значение "Истина" , то экран перед выводом информации будет очищен. Поэтому, если вам требуется объединить текущий вывод с информацией уже находящейся на экране, то установите этот режим в значение "Ложь" . Режимы "X" и "Y" определяют точку на экране, с которой начинается вывод информации. Экран блока EV3 имеет 178 пикселей (точек) в ширину и 128 пикселей в высоту. Режим "X" может принимать значения от 0 до 177, режим "Y" может принимать значения от 0 до 127. Верхняя левая точка имеет координаты (0, 0), правая нижняя (177, 127)

Во время настройки программного блока "Экран" можно включить режим предварительного просмотра (Рис. 9 поз. 3) и визуально оценить результат настроек вывода информации.
В режиме "Фигуры" (Рис. 11 поз. 1 ) настройки программного блока меняются в зависимости от типа фигуры. Так при отображении круга необходимо будет задать координаты "X" и "Y" центра окружности, а также значение "Радиуса" . Параметр "Заполнить" (Рис. 11 поз. 2) отвечает за то, что будет отображен либо контур фигуры, либо внутренняя область фигуры будет заполнена цветом, заданным в параметре "Цвет" (Рис. 11 поз. 3) .

Для отображения прямой необходимо задать координаты двух крайних точек, между которыми располагается прямая.

Чтобы отобразить прямоугольник следует задать координаты "X" и "Y" левого верхнего угла прямоугольника, а также его "Ширину" и "Высоту" .

Отобразить точку проще всего! Укажите лишь её координаты "X" и "Y".
Режим "Изображение" , наверное, самый интересный и самый используемый режим. Он позволяет выводить на экран изображения. Среда программирования содержит огромную библиотеку изображений, отсортированную по категориям. В дополнение к имеющимся изображениям вы всегда можете создать свой рисунок и, вставив его в проект, вывести на экран. ("Главное меню среды программирования" - "Инструменты" - "Редактор изображения") . Создавая своё изображение, вы можете также вывести на экран символы русского алфавита.

Как вы видите - отображению информации на экране главного модуля EV3 среда программирования придает огромное значение. Давайте рассмотрим следующий важный программный блок "Звук" . С помощью этого блока мы можем выводить на встроенный динамик блока EV3 звуковые файлы, тона произвольной длительности и частоты, а также музыкальные ноты. Давайте рассмотрим настройки программного блока в режиме "Воспроизвести тон" (Рис. 15) . В этом режиме необходимо задать "Частоту" тона (Рис. 15 поз. 1) , "Продолжительность" звучания в секундах (Рис. 15 поз. 2) , а также громкость звучания (Рис. 15 поз. 3) .

В режиме "Воспроизвести ноту" вам вместо частоты тона необходимо выбрать ноту на виртуальной клавиатуре, а также установить длительность звучания и громкость (Рис. 16) .

В режиме "Воспроизвести файл" вы можете выбрать один из звуковых файлов из библиотеки (Рис. 17 поз. 1) , либо, подключив к компьютеру микрофон, с помощью Редактора звука ("Главное меню среды программирования" - "Инструменты" - "Редактор звука") записать собственный звуковой файл и включить его в проект.

Давайте отдельно рассмотрим параметр "Тип воспроизведения" (Рис. 17 поз. 2) , общий для всех режимов программного блока "Звук" . Если данный параметр установлен в значение "Ожидать завершения" , то управление следующему программному блоку будет передано только после полного воспроизведения звука или звукового файла. В случае установки одного из двух следующих значений начнется воспроизведение звука и управление в программе перейдет к следующему программному блоку, только звук или звуковой файл будет воспроизведен один раз или будет повторяться, пока не его не остановит другой программный блок "Звук" .
Нам осталось познакомиться с последним программным блоком зеленой палитры - блоком "Индикатор состояния модуля" . Вокруг кнопок управления модулем EV3 смонтирована цветовая индикация, которая может светиться одним из трех цветов: зеленым , оранжевым или красным . За включение - выключение цветовой индикации отвечает соответствующий режим (Рис. 18 поз. 1) . Параметр "Цвет" задает цветовое оформление индикации (Рис. 18 поз. 2) . Параметр "Импульсный" отвечает за включение - отключение режима мерцания цветовой индикации (Рис. 18 поз. 3) . Как можно использовать цветовую индикацию? Например, можно во время различных режимов работы робота использовать различные цветовые сигналы. Это поможет понять: так ли выполняется программа, как мы запланировали.

Давайте используем полученные знания на практике и немного "раскрасим" нашу программу из Задачи 1.
Попробуйте решить задачу самостоятельно, не подглядывая в решение!

Одна из ключевых задач мобильной робототехники – это поиск маршрута для движения и его оптимизация. Перемещаясь в рабочей местности, робот должен постоянно оценивать окружающую обстановку, определять свое положение и положение окружающих его объектов. Существует множество различных способов, с помощью которых робот может определять собственное положение и строить маршрут между точками назначения. При перемещениях на улице применяется технология спутниковой навигации, а окружающие объекты обнаруживаются с помощью камер или дальномеров. В случае перемещения внутри помещений с помощью камер и дальномеров строится виртуальная модель пространства, по которой робот ориентируется в дальнейшем. Вышеописанные методы имеют общий характер и применимы в произвольных ситуациях, но из-за этого они очень сложны в реализации и еще не применяются широко в повседневной жизни.

Как правило, автономные робототехнические системы проектируются под конкретные задачи. Такой подход позволяет формализовать требования к системе и разработать все возможные алгоритмы реакции на изменение состояния окружающей обстановки.
Например, одной из достаточно жестко формализованных задач может быть перемещение объектов внутри производственного помещения. Как правило, при перевозке грузов на складах или в производственных цехах роботы преодолевают один и тот же маршрут постоянно. Соответственно данный маршрут заранее известен и для него можно разработать систему управления движением робота.
Ранее цеховые транспортные средства представляли собой тележки, перемещающиеся по рельсам. С ростом науки и техники на смену им пришли робокары – мобильные роботы разных типов и для различных задач, а рельсы, проложенные вдоль цеха, заменила паутина направляющих линий, начерченных на полу.

Мобильные роботы, передвигающиеся в цехах вдоль линии, подобно роботам из предыдущих лабораторных работ оснащаются различными сенсорными устройствами для восприятия окружающей обстановки: ИК-датчиками, камерами, датчиками безопасности и т.п. Но в отличие от рассматриваемых ранее роботов, реальные роботы работают отнюдь не в лабораторных условиях – зачастую направляющая линия может быть повреждена или скрыта за каким-либо объектом, некоторые маршруты могут пересекаться или вовсе прерываться частично.

На реальный маршрут могут накладываться различные ограничения, например: некоторые участки маршрута могут быть запрещены для движения, а некоторые могут быть достигнуты только после проезда через другие.

Становится очевидным, что методы движения вдоль линии, представляющей собой замкнутую траекторию, не совсем приемлемы в подобном случае. С примерами различных алгоритмов движения вдоль линии можно ознакомиться в предыдущих работах, но сразу же можно сделать вывод о том, что ни один из них не учитывает прерывистости траектории движения или наличия на ней пересечений.
Если в процессе движения управляющая программа мобильного робота окажется не в состоянии определить наличие пересечения направляющих линий, это может привести к неоднозначности принятия решения.

При переезде пересечения линий система управления мобильного робота получит данные, свидетельствующие о том, что направляющая линия находится одновременно и справа и слева относительно робота. Соответственно процесс принятия решения о последующих маневрах будет нарушен.


Для того распознавания пересечений направляющих линий может применяться множество различных способов, например в подобных целях достаточно часто применяются камеры. Но обработка изображений требует большой производительности бортового компьютера робота, поэтому такие решения не всегда применимы. В данной работе рассматривается способ управления мобильным роботом с помощью информации, поступающей от массива ИК-датчиков. С помощью массива из семи датчиков S1-S7 становится возможным определить местоположение пересечений линий. Поскольку вариантов наиболее вероятных пересечений достаточно много, следует настраивать управляющую программу робота на максимально возможное количество допустимых вариантов, определенных на основании показаний ИК-датчиков.
В процессе движении вдоль маршрута, представляющего собой пересекающуюся линию, помимо отслеживания линии необходимо осуществлять выбор направления движения на каждом из перекрестков. Прохождение правильной последовательности перекрестков дает возможность проехать заданный маршрут верным образом.

В рамках данной работы предлагается разработать программу следования вдоль заданного маршрута. В качестве примера рассмотрим базовый маршрут, приведенный на рисунке. Чтобы разработать программу для движения вдоль данного маршрута на нем необходимо выделить особые точки, являющиеся пересечениями маршрута или его разрывами. Для того чтобы робот доехал до финиша, он должен следовать вдоль линии и пройти четыре указанные точки.
Движение по заданному маршруту определяется алгоритмической последовательностью, которая задает один из маневров в каждой из ключевых точек. В частности, в приведенном примере на первом пересечении маршрута робот продолжает движение в прямом направлении, на втором поворачивает налево, а на третьем – направо и следует до финишной черты.


Аналогичным образом можно разработать программу движения робота вдоль любого из более сложных маршрутов. Для этого всего лишь необходимо задать последовательность движения робота через пересечения маршрута.
Управляющая программа сводится к поочередному поиску каждой из точек заданной последовательности. Каждая из точек описывается собственной функцией, с помощью которой она распознается, а также скоростью прохождения данного участка, которая определяется на стадии инициализации программы.

Текст программы представляет собой последовательность поочередных вызовов функций, задающих требуемое движение. Для того чтобы варьировать направление движения робота вдоль линии, необходимо всего лишь поменять очередность вызова функций.

Вышеуказанные функции можно разделить на два основных типа:
1) Функции, осуществляющие поворот робота на Т-образных и Г-образных перекрестках.
2) Функции, с помощью которых робот движется до ближайшего перекрестка без каких-либо действий.
В первом случае функция состоит из двух отдельных операций – вызова функции движения вперед и вызова функции поворота в заданном направлении.

Функция l_node_l_turn предназначена для осуществления поворота налево на ближайшем левом пересечении. Функция состоит из двух других функций: l_node_forward отвечающей за движение до ближайшего Г-образного перекрестка с поворотом налево, и pivot_left, за сам отвечающей за поворот налево.

Функция l_node_forward в бесконечном цикле ищет точку пересечения траекторий с помощью функции l_node_detect. Во время поиска робот постоянно следует линии с помощью функции follow_line. После обнаружения точки пересечения маршрутов робот совершает кратковременный рывок вперед, ограниченный временем таймера, для того чтобы слегка сместиться для дальнейшего поворота налево. Данное перемещение крайне важно, для того чтобы после маневра робот оказался по центру направляющей линии. Особое внимание следует уделить процессу распознавания точек пересечения маршрута. Очевидно, что в процессе движения робота по маршруту могут возникнуть различные ситуации, но большинство из них можно описать формальными признаками, например по срабатыванию ИК-датчиков.

Рассмотрим процесс движения робота через участок маршрута с левым поворотом. Очевидно, что в процессе движения робота часть ИК-датчиков попадет на черную линию и возникнет одна из ситуаций, проиллюстрированных ниже.

На рисунке черным цветом отмечены ИК-датчики, расположенные над черной линией, в свою очередь белым цветом – расположенные над белым участком поверхности. В процессе движения робота можно опросить каждый из датчиков и с помощью перебора вариантов определить текущее положение робота.

В приведенной выше функции описывается процесс распознавания левого Г-образного поворота. Согласно приведенному алгоритму под подобной точкой маршрута понимается участок траектории, на котором срабатывают ИК-датчики № 1, № 2, № 3.
Подобным образом можно распознать любой участок маршрута. На первый взгляд это может показаться достаточно простой задачей, но стоит уделять повышенное внимание точности распознавания текущего положения. На точность работы программы могут влиять качество рабочей поверхности, скорость движения робота. Для повышения точности работы программы в функции l_node_detect реализован механизм защиты от ложных срабатываний. Одно и то же условие проверяется дважды после программируемой задержки.

Меры повышения точности работы управляющей программы крайне важны при разработке системы управления. Пренебрежение ими может привести к некорректной работе алгоритма и всей робототехнической системы в целом.
В реальных ситуациях мобильные роботы перемещаются не только по прямолинейным участкам маршрута, но и по криволинейным траекториям, а также выполняют различные маневры.

Чем больше система управления содержит в себе описаний подобных маневров, тем более сложные маршруты может преодолевать робот. Например, на подобии того маршрута, что приведен ниже на рисунке.

В целом программа управления идентична программе, рассматриваемой в предыдущей части. Также как и для любой другой программы задается последовательность прохождения узлов траектории.

По сравнению с предыдущей частью работы добавились два новых типа движений – движение по дуге окружности и движение по диагонали, причем каждое из этих движений различается по направлениям.

Каждая из этих функций состоит из функции следования маршруту - diag_corner_forward, I_curve_branch_forward и функции поворота в требуемом направлении – pivot_left, pivot_right. Контроль за движением робота вдоль линии под углом осуществляется с помощью ИК-датчиков № 1 и № 7, которые задают положение робота над линией. Если же робот оказывается над линией, то запускается функция follow_line, с помощью которой робот отслеживает собственное положение относительно линии и центрируется на ней с помощью ИК-датчика № 4.

Следование линии нацелено в первую очередь на движение вдоль нее с ориентацией центра робота над линией. Поскольку центр робота совпадает с ИК-датчиком № 4, функция follow_line стремится минимизировать отклонения ИК-датчиков № 3 и № 5 относительно линии.

Суть данного процесса сводится к выполнению ряда условий:
1) Если ИК-датчик № 4 находится над линией, то робот едет прямолинейно с максимальной скоростью.
2) Если один из ИК-датчиков № 3 или № 5 обнаружил линию, то робот поворачивается в противоположном направлении с минимальной скоростью.
Во время следования линии изменяется, в зависимости от положения робота, скорость его маневрирования. Это сделано из-за того, что в некоторых ситуациях необходимы плавные движения робота, чтобы он не съехал с линии, например при маневрировании между датчиками № 3 и № 5.
В случае же если робот отклонился от линии достаточно сильно, необходимо скорректировать его положение максимально быстро, поэтому скорость его движения увеличивается.
За изменение скорости движения робота отвечает функция change_speed, которая задает скорость вращения приводов в процентном соотношении от значения максимальной скорости.

Помните, что соблюдение скоростного режима – одно из важнейших условий, влияющих на движение робота по заданному маршруту. Одно из важнейших требований к алгоритму управления мобильным роботом – соблюдение оптимальной скорости для данного участка маршрута.

Соблюдение скоростного режима – это не просто требование безопасности движения, это в первую очередь требование, позволяющее минимизировать ошибки работы управляющей программы робота. Стоит помнить, что скорость движения робота существенным образом влияет на качество распознавания узловых точек маршрута и ориентацию самого робота относительно направляющей линии.
Основная цель разработчика робототехнических систем – это обеспечение качественной и безотказной работы в процессе функционирования. Ради этого можно пожертвовать многим – производительностью, ресурсоемкостью и т.п., в том числе и быстродействием.
Данная лабораторная работа наиболее важная среди работ, рассмотренных ранее. Это обусловлено не только сложностью преподносимого материала, но и затронутыми важными проблемами, такими как обеспечение точности и качества работы робототехнических систем.

Цель данной работы продемонстрировать, что не только внешние факторы влияют на качество работы того или иного робота. Существенное влияние на процесс выполнения поставленной задачи может оказывать сам робот, функционирующий на основании программы управления.
Рассмотренные в обеих частях программы наглядно демонстрируют влияние скорости движения на качество прохождения заданной траектории. Для закрепления результатов работы можно исследовать движение робота по приведенному ниже маршруту, сочетающему в себе все возможные маневры, рассмотренные ранее.

Помимо сложности маршрута и скорости движения на функционирование робота существенное влияние оказывает качество поверхности, по которой осуществляется движение. Вполне возможна ситуация, что линия, вдоль которой должен передвигаться робот, может оказаться поврежденной или даже закрашенной.

Разработчик робототехнической системы должен предусмотреть все возможные варианты применения своего проектного решения. Чем больше всевозможных влияющих факторов будет учтено на стадии проектирования, тем точнее и качественнее будет функционировать робот.
Вредоносное ПО (malware) - это назойливые или опасные программы,...

Лучшие программы для восстановления данных с любых носителей информации....

Здравствуйте.Одна из самых распространенных причин, по которым тормозит...